Introducción a la animación por computadora
5.1 Historia, evolución y aplicación de la graficación por computadora.
1919-1990
Creación de la Primera Computadora ENIAC por Jhon Presper Mauchly y John William Mauchly.
ENIAC (Electronic Numerical Integrator And Computer) utilizado por el Laboratorio de Investigación Balística del Ejercito de los Estados Unidos.
Era totalmente digital ejecutaba sus procesos y operaciones mediante instrucciones en lenguaje máquina, a diferencia de las otras máquinas computadoras contemporáneas de procesos analógicos.
Presentada en público el 15 de febrero de 1946.
Ocupaba una superficie de 167 m² y operaba con un total de 17.468 válvulas electrónicas o tubos de vacío que a su vez permitían realizar cerca de 5000 sumas y 300 multiplicaciones por segundo.
1950.
Computadoras Digitales.
Están basadas en dispositivos biestables que solo pueden tomar uno o dos valores posibles tienen como ventaja el poder ejecutar diferentes programas para diferentes problemas sin tener la necesidad de modificar físicamente la computadora.
La graficación tuvo sus inicios con el surgimiento de las computadoras digitales.
1950-1960
Inicia la graficación en 2D.
El primer avance de la computación gráfica fue la utilización de los rayos catódicos. La gráfica de vector almacena datos geométricos precisos, topología y estilo como posiciones de coordenadas de puntos, las uniones entre puntos y el color, el grosor y posible relleno de las formas.
La mayor parte de los sistemas de vectores gráficos también puede usar primitivas geométricas de forma estándar como círculos y rectángulos.
1956-1959
Refresh TUbe
Divide la pantalla en millones de pixeles iluminado o no en cada barrido de la imagen.
1976
Se forma Siggraph
ACM asociación de máquinas computadoras forma un grupo de interés especial en aplicaciones gráficas.
1980
Auge de Graficación.
· Se dan grandes avances en el hardware permitiendo mejor desarrollo de la graficación.
· Graficación en la T.V y uso personal.
· Avalancha de comercialización de programas CAD, más abiertos y sofisticados a precios accesibles.
· Turner Whitted publicó un artículo en el año 80 sobre un nuevo método de representación para simular superficies altamente reflexivas. Conocido hoy como raytracing.1999 – 2000.
En la actualidad
La mayoría de las personas que trabajan con gráficos utilizan computadoras de grandes capacidades: discos duros de terabytes, tarjetas gráficas aceleradoras de video con memoria en gigabytes, mouse óptico y memoria RAM en el orden de los gigas. También son muy utilizadas las computadoras Macintosh especialmente en lo relacionado a efectos especiales y gráficos de animación.
5.2 Tipos de animación 2D
Animación 2D: En este tipo de animación sólo pueden moverse horizontalmente (movimientos hacia adelante y hacia atrás) y verticalmente (movimientos hacia arriba y hacia abajo). Los objetos son planos, como en una fotografía.
Tipos
5.2.1 Tweening
Es un término usado específicamente para las técnicas tradicionales de animación.
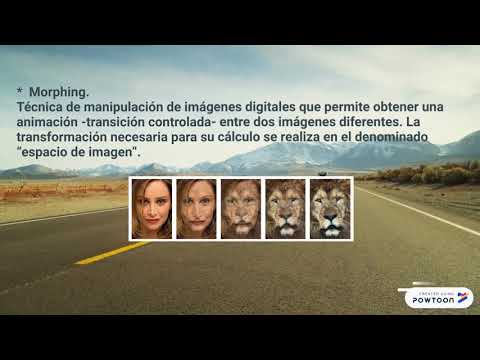
5.2.2 Morphing
En el morphing de imágenes se utilizan dos efectos básicos; la deformación de la imagen, redistribuyendo sus colores y formas, y el fundido de dos imágenes, pasando de forma continúa de una a otra. Ambos efectos parten de una descomposición del espacio de la imagen en una malla de triángulos. Para especificar un cambio continuo en la forma de la imagen basta con describir cómo varía la posición de los vértices de la malla de un instante de tiempo al instante posterior.
El morphing se produce automáticamente cuando se mueven los vértices sin alterar las coordenadas de textura originales.
5.2.3 Onion skinning
es una técnica de gráficación 2D utilizada en la creación de dibujos animados y películas de edición para ver varias imágenes a la vez. De esta manera, el animador o editor puede tomar decisiones sobre cómo crear o cambiar una imagen basada en la imagen anterior en la secuencia.
5.3 Tipos de animación 3D
Animación 3D: En este caso, los objetos también pueden moverse más cerca o más lejos de la persona que ve la animación. Tiene un nivel de calidad y detalle que lo vuelve muy cercano a las imágenes de la realidad, en algunos casos haciéndose imperceptible la diferencia entre la animación y un objeto real.
5.3.1 Cel-Shaded
Es un tipo de renderización no fotorrealista diseñada para hacer que los gráficos por computadora parezcan dibujados a mano. Las sombras planas se usan comúnmente para imitar el estilo de los cómics o dibujos animados.
5.3.2 Morph
En este caso no se trata de modificar una imagen sino la forma del objeto en tres dimensiones. Este cambio continuo puede utilizarse en animación para representar deformaciones o crear efectos visuales. Otro uso, más técnico, consiste en suavizar las transiciones entre diferentes representaciones de un mismo objeto cuando éstas tienen diferente nivel de detalle.
5.3.3 Skeletal
Se crea una representación simplificada del cuerpo del personaje, análogo a un esqueleto o a un stickman. En personajes humanos y animales, muchas partes del modelo de esqueleto corresponden a la ubicación real de los huesos, pero la animación del modelo de esqueleto skeletal animation es también utilizada para animar otras cosas, como expresiones faciales.
5.3.4 Motion Capture
La captura de movimiento (del inglés motion capture, o motion tracking, también abreviada mocap) es una técnica de grabación de movimiento, en general de actores y de animales vivos, y el traslado de dicho movimiento a un modelo digital, realizado en imágenes de computadora.